Kokot, M., Miklić, D. and Petrović, T., 2021. Path continuity for multi-wheeled AGVs. arXiv preprint arXiv:2103.01619.



Products
Research, innovation, development
With over four decades of combined R&D experience in robotics and autonomous navigation, our team is dedicated to bringing cutting-edge algorithms and methods from the research lab to demanding real-life applications. We provide autonomous navigation modules to power the next generation of load transportation vehicles. From perception and localization to layout planning and path following, we can provide all the components to power your autonomous application.
We believe that all software, and especially autonomous navigation software, should be clean, efficient, modular and portable. Our navigation modules are written in ISO-standard C++11, and are available as precompiled libraries on a variety of platforms. Additionally, we provide Robot Operating System (ROS) wrappers for seamless integration into existing ROS-based systems.
Accurate path following
Our patent-pending technology is based on the model predictive control (MPC) method, guaranteeing high positioning accuracy and precision along the whole path. Our navigation technology uses paths defined as parametric curves (e.g, Bezier curves) to calculate optimized trajectories with the respect to the kinematic and dynamic abilities of a given vehicle
Advantages
- > Optimal control method ensures high
positioning accuracy even at top speeds - > Optimized velocity profile when taking turns
- > High precision enables driving through tight turns


Comparison between traditional
approaches and our MPC approach
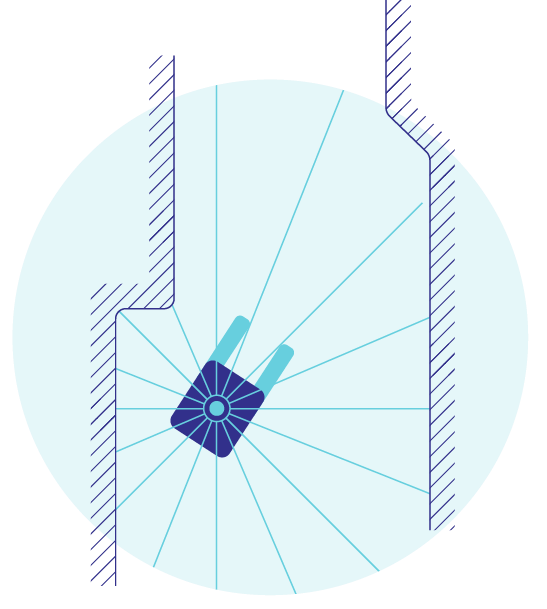
Traditional approach with markers
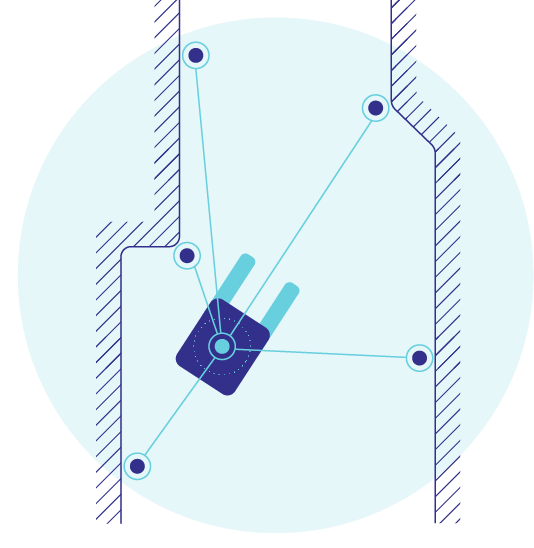
Natural localization
Our localization algorithms fuse laser range readings with encoder odometry data to provide real-time vehicle pose estimation with sub-centimeter accuracy. We rely only on on-board sensor data, without requiring dedicated navigation infrastructure such as reflective markers or magnetic guides. This approach provides maximum flexibility while reducing setup effort and costs.
Advantages
- > better robustness
- > lower setup effort and cost
- > lower maintenance cost
- > increased flexibility
Natural approach
Layout tool
Our Layout tool provides an user-friendly graphical interface for laying out and optimizing navigation roadmaps. The generated roadmap ensures smooth, G3-continuous paths. The safety-check feature can use maps generated from safety laser data to verify and visualize interferences with protective fields, helping you to design safe and efficient paths.
Advantages
- > smooth paths represented by Bezier curves
- > guaranteed G3-continuity between segments
- > Checking and visualisation of environment
interference with protective fields

Semantic perception
[under development]
Using camera images and cutting-edge deep learning methods, our technology endows vehicles with semantic understanding of their surroundings. Vehicles can identify driveable space, obstacles, humans, other vehicles, pallets and other objects of interest, and adapt their behavior according to the current situation.
Demo videoResearch, development and open source
Our company is built on academic research. As we work on applying the most advanced scientific results to demanding real-life scenarios, we recognize the need to keep improving these results and generate new ones. We believe that exposing our research to the scrutiny of the academic publication process is the best way to organize, distill and validate our findings, as well as engage in a fruitful exchange of ideas with the academic community.
We are big believers in open-source software. By standing on the shoulders of giants, it enables us to build on top of the work of brilliant people and communities. We do our best to contribute to open source projects we use regularly, most notably Cartographer. We’re also committed to open-sourcing parts of our work that could be of broader interest to others
- HERE IS A LIST OF OUR RECENT PUBLICATIONS:
-
> 2021
-
> 2020
Draganjac, I., Petrović, T., Miklić, D., Kovačić, Z. and Oršulić, J., 2020. Highly-scalable traffic management of autonomous industrial transportation systems. Robotics and Computer-Integrated Manufacturing, 63, p.101915.
Chung, J.J., Miklić, D., Sabattini, L., Tumer, K. and Siegwart, R., 2020. The impact of agent definitions and interactions on multiagent learning for coordination in traffic management domains. Autonomous Agents and Multi-Agent Systems, 34(1), pp.1-27.
- > 2019
Kovačić, Z., Vasiljević, G., Draganjac, I., Petrović, T., Oršulić, J., Bogdan, S., Miklić, D. and Kokot, M., 2019. Autonomous Vehicles and Automated Warehousing Systems for Industry 4.0. Engineering Power: Bulletin of the Croatian Academy of Engineering, 14(2), pp.17-23.
- > 2018
- > 2017
Popović, G., Oršulić, J., Miklić, D. and Bogdan, S., 2017, November. Rao-Blackwellized Particle Filter SLAM with Prior Map: An Experimental Evaluation. In Iberian Robotics conference (pp. 14-25). Springer, Cham.
- > 2016
Vasiljević, G., Miklić, D., Draganjac, I., Kovačić, Z. and Lista, P., 2016. High-accuracy vehicle localization for autonomous warehousing. Robotics and Computer-Integrated Manufacturing, 42, pp.1-16.
Draganjac, I., Miklić, D., Kovačić, Z., Vasiljević, G. and Bogdan, S., 2016. Decentralized control of multi-AGV systems in autonomous warehousing applications. IEEE Transactions on Automation Science and Engineering, 13(4), pp.1433-1447.
- > 2015
- > 2014
Krnjak, A., Draganjac, I., Bogdan, S., Petrović, T., Miklić, D. and Kovačić, Z., 2015, May. Decentralized control of free ranging AGVs in warehouse environments. In 2015 IEEE International Conference on Robotics and Automation (ICRA) (pp. 2034-2041). IEEE.
Vasiljevic, G., Petric, F. and Kovacic, Z., 2014, June. Multi-layer mapping-based autonomous forklift localization in an industrial environment. In 22nd Mediterranean Conference on Control and Automation (pp. 1134-1139). IEEE.
Bazier curves
Bezier curves are a type of parametric curves widely used in computer graphics and for modeling smooth curves. We developed a fast and lightweight C++ library Bezier which supports operations on 2D Bezier curves of arbitrary order. With this library at the core of our products, we can achieve smooth and precise navigation for mobile robots while maintaining high performance.
